Calibration
The sensitivity of acoustic loggers is a major factor in determining the sea area within which animals are detected. In most studies uniformity of sensitivity is important so that instruments can be interchanged between sites without significant differences in performance.
Chelonia carries out individual radial sensitivity measurements which are provided with each instrument. The hydrophone design is very robust so that changes in sensitivity are rare.
Calibration

Testing the acoustic performance of the underground test tank during construction to assess acoustic loss rates to the surrounding ground at different frequencies.
Details of the calibration method used are below.
Radial variation ...
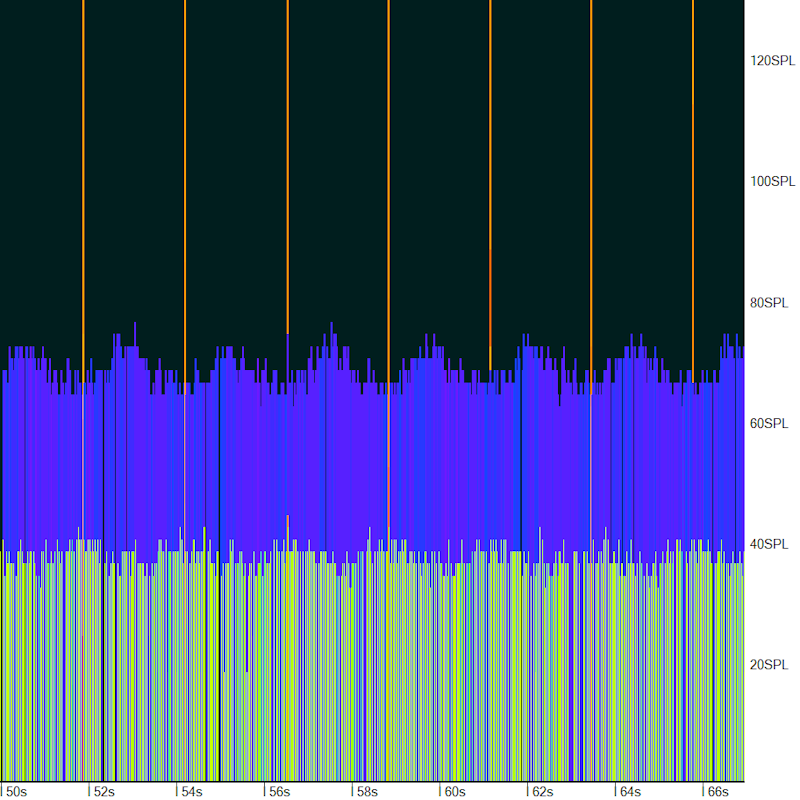
Each hydrophone is rotated in a calibrated sound field to determine its radial variation. Seven full rotations are shown here.
Hydrophones must have a radially averaged, temperature corrected, max sound pressure level reading within 5% (±0.5dB) of the standard at 130kHz to be used in PODs.
... results
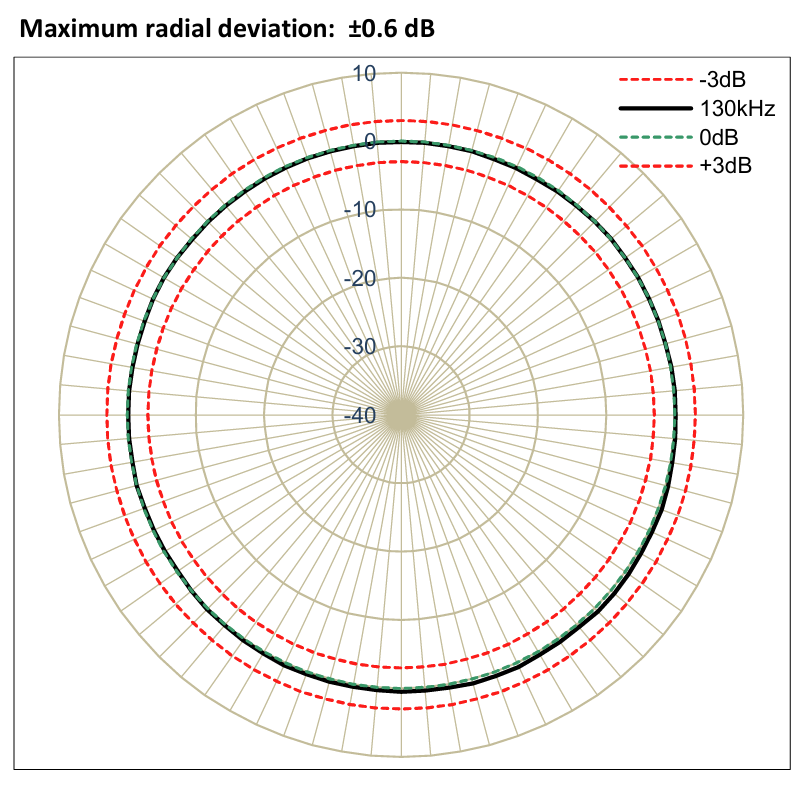
These are the results from the data above.
This level of radial variability is within the range of values seen in those commercially produced hydrophones that publish this specification. The radial values are taken at 5 degree intervals.
Frequency response
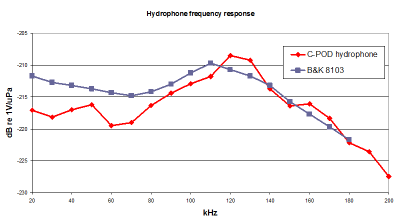
The C-POD used a two-element hydrophone to give some enhanced performance in detection of NBHF clicks.
These graphs come from tests at the National Physical Laboratory in London.
How is hardware calibrated?
Step 1. POD transducer housings are soaked for a few hours before testing to include the rise in sensitivity seen on full wetting.
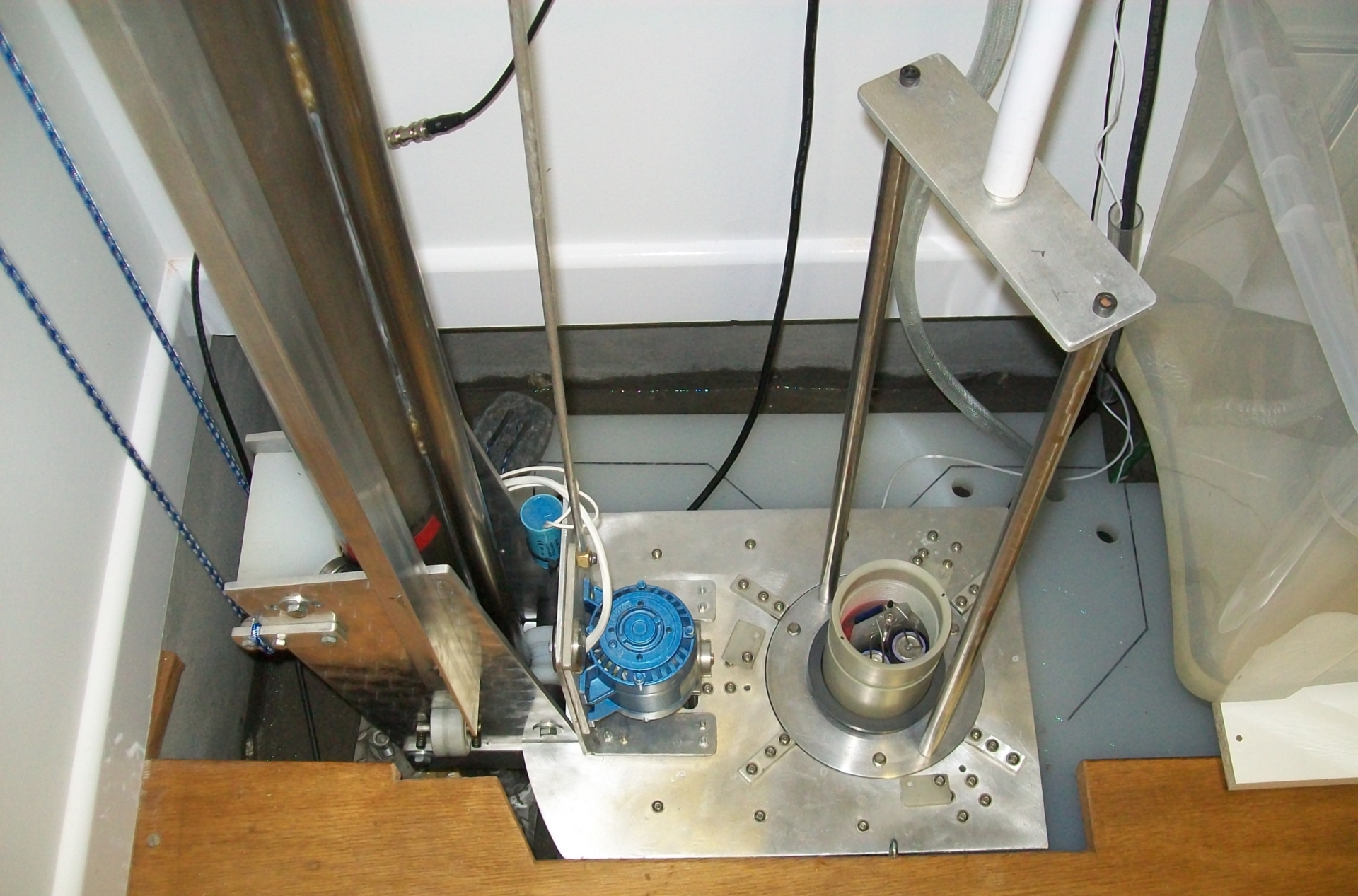
Step 2. The sub-surface water tank has a star shape to minimise echo-returns to the centre of the tank, and acoustic loss to the ground is good. This avoids the serious difficulty of operating in an echo-field in which tiny displacements of a few millimetres can produce large changes in readings.
Step 3. The PODs are rotated mechanically.
Step 4: Tank performance: the red trace is the drive to the output hydrophone and the blue trace is the sound received at the POD transducer position. The loudest echo is 0.65 ms after the start of the signal and is derived from the concrete/ground interface.
Step 5: The tank has an accurately positioned set of source and monitoring hydrophones to enable sensitive monitoring of the system. The POD is rotated at an accurately controlled depth.
Step 6: Two test signals are used 70 and 130 kHz. The standardisation is based on the higher frequency signal which is a simulated porpoise click at 130 kHz.

Step 7: The recorded values are radially averaged and temperature corrected, to give a maximum SPL (sound pressure level) reading within 5% of the standard at 130 kHz (= ±0.5dB). The radial variation is < ±3dB at 130 kHz. These radial values are taken at 5 degree intervals and are not averaged.
Step 8: Typical test results during standardisation showing SPL logged during rotation. The repeated radial sensitivity pattern is seen.
Step 9: Radial variation is tested at two sample frequencies: 130 kHz and 70 kHz. Radial charts showing calibration and radial variation can be provided to users.
There is a small variation of sensitivity with temperature which is mainly due to the change in acoustic impedance of the tranducer housing, and this has been included in the calibration as it significantly reduces the differences between measurements made weeks or longer apart when the tank may have cooled or warmed. Click rate: 36 clicks per second, which with a rotation speed of 1 revolution per 2 seconds, produces 72 radial measurements, i.e. one every 5 degrees.
False positive rates
Four powerful methods have been used to establish the validity of classifications:
- Visual monitoring during deployment. Several published papers report such studies.
- Visual validation of detections displayed in FPOD.exe This has become a powerful method and is desscribed in this paper: https://doi.org/10.1371/journal.pone.0293402
- Assessment of the clustering of the different train quality classes allocated by the KERNO classifier. This is shown as the TIC = train interval clustering metric on the analysis page of the FPOD app.
- Assessment of the spatial and temporal clustering of detections within arrays of PODs in very low density areas.
In most projects the excess of true positives over false positives is so large that, following visual checks on a sample of detected trains, there is no point in taking any action to remove false positives as the impact on operational statistics is very far below the level of statistical noise from other sources such as inter-annual variations, changing distributions, etc.
Extreme monitoring
False positives are very significant where very low densities of animals are being monitored and when no animals are present the false positive fraction can only be 0 or 100%. In such extreme contexts secondary encounter classifiers are useful.
The ‘Hel1’ classifier was developed out of a small international workshop at the Hel Marine Station in Poland in 2010, at which 60.8 years of POD data containing 5 billion clicks was evaluated. Hel1 was built to process this Baltic data to detect harbour porpoises and it achieves false positive rates of far less than 1 minute per year of logging falsely identified as ‘porpoise positive’.