Chelonia LimitedWildlife Acoustic Monitoring | |||||||||||||||||||||||||||||||||||
DeploymentFeedback
Safety at seaDeployment of moorings requires very careful thought before going to sea:
These risks apply to many fisheries and 1 & 2 above regularly cause deaths in UK fisheries. Acoustic release moorings with small anchors reduce all of these risks. Recovering lost PODs
If you prefer not to write your contact details on the POD, the address of our contact web site, www.phonehome.org.uk is embossed in the lid. This is a simple web site that will allow someone who finds a POD to contact us so that we, in turn, can contact you to arrange its return. Over 150 PODs have been recovered using this method. Where should PODs be moored?Any position between 2 metres above the sea bed and 5 metres below the surface is possibly good. Relevant factors include:
Additional information can be found in this PowerPoint file Mooring problems
Notes on solutionsNo surface buoyAcoustic release: these are expensive, but allow you to use a light, fast boat to visit many moorings. Handling light gear is much less costly, quicker and less dangerous. In this photo there is a banana pinger, under test, on the line below the buoys. The mooring below uses no metal:metal connections and is light enough for one person to carry.
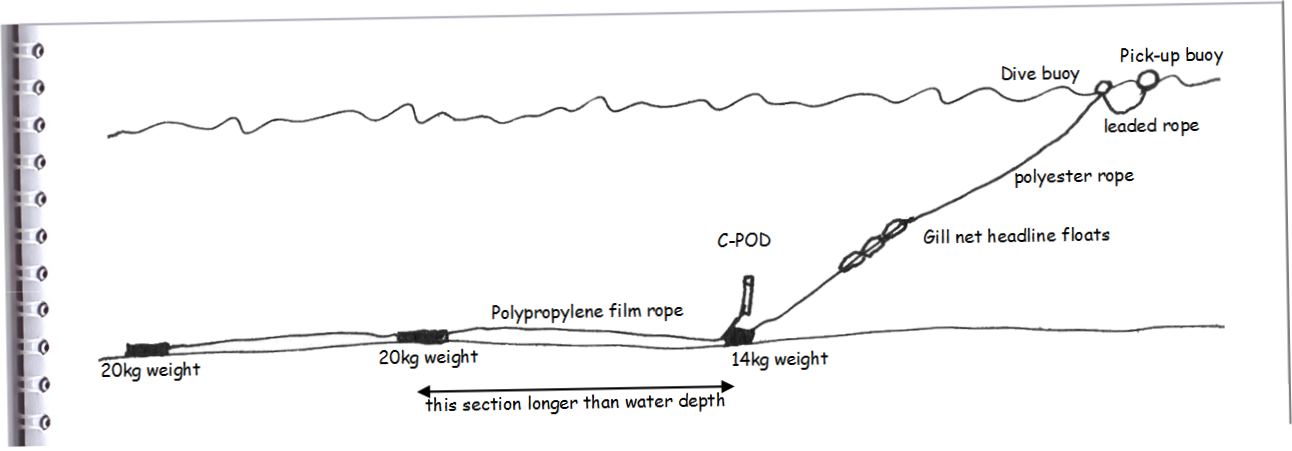
The release is fired from a deck unit – an acoustic remote control that allows you to get a distance to the release before you release it. The rig then surfaces within less than a minute and is still connected to the anchor weights by a thin rope that you can use to lift those weights. In this rig the POD can be exchanged without untying or tying any knots. The rope is then fitted back inside the black canister and the release is reset - this process takes 15 minutes. Grappling line: a bottom line, usually buoyant (polypropylene) and at least 20m long, set between two anchors at a known location and orientation. This requires shallow water and a sand or mud sea bed, so that you can haul a grappling device across the position of the line to catch it. Vertical grapple: A buoyed line that floats up from the mooring but does not reach the surface. It is retrieved by circling the mooring location towing a weighted line with light grapples on it. After two circles the boat moves over the mooring position and pull in the line which, hopefully, will become tangled with the vertical grapple line. Diver moorings: often very successful in shallow water. Timed release: releasing a small buoy and line. No examples yet. Tidal dive buoys: if the mooring line is not much longer than depth the buoy may be pulled during tidal currents and available for theft or retrieval only at slack water. Hard buoy required. This method limits number of moorings that can be serviced on one tide. Low dragSmall buoys / pipe buoys give less wave drag. The lower limit on size is set by the risk of biofouling sinking the buoy, or tidal currents holding it down. If the buoy is pulled down for part of the tide cycle you may need to use a hard buoy so that it doesn't lose buoyancy at depth and fail to surface. Pipe buoys are vertical tubular buoys with some weight at the lower end to make them stand up. A long mooring line e.g. more than twice water depth, reduces the lifting action with passing waves but it will increase the swing of the buoy. Elastic mooringsA simple mooring consisting of a weight with a direct line to a large surface buoy is very risky. Waves get a direct upward pull on the weight and can make quite massive weights move long distances in small steps. A design with elasticity to take up the pull distance of each wave can be stable with a much smaller weight. The elasticity means that each wave has to stretch out the mooring before it can pull hard on the anchor, and normally the wave has passed before the mooring is fully stretched. During the slack phase of the wave the mooring recovers. Elasticity can be built in at several points. Working from the bottom up: Distributed bottom weights: Chain from the anchor is an ancient method. During the wave slack the chain falls to the bottom pulling the buoys back. Chain is expensive and corrodes fast, so a cheaper method is to have one or more heavy weights on the line. Take care over abrasion risks. Midwater float and sinker: a hard buoy on the line with a smaller weight further up creates an 'N' shape in the line that is elastic. In the drawing below a leaded (heavy) rope, blue, has been used instead of a weight. The buoys must be able to carry the weight and drag, so hard buoys may be needed. Dive buoy – a surface sinker: a small buoy a few metres from the main buoy will pull the main buoy back towards the anchor if the small buoy has been pulled down by a wave. A simple and very valuable technique that should be used in almost every mooring with surface buoys. It has an added advantage that pairs of buoys are easier to find in choppy seas. Surface lead lines: a length of sinking (leaded) rope between the main and dive buoys will pull them together during the slack part of the wave. Pipe buoys: if a choice is permitted long thin pipe-buoys give elasticity as they can sink a long way in response to pull on the line where a spherical buoy would exert a huge pull. AbrasionRope sheaths: Thread ropes at vulnerable positions through tough flexible plastic pipes or hosepipes. The most vulnerable positions are near the bottom – see Acoustic release above. If the POD is moored from the centre and barnacles, mussels, etc grow on it they can abrade the rope as the POD moves around in the current. Bad rope joins: Ropes that are looped through each other can move back and forth and abrade each other. Use nylon '8' shaped links or make sure that ropes are joined in ways that don't allow relative movement. Corrosion / fracture / failureMetal components are surprisingly often the link in a mooring that fails and some yacht moorings are now metal-free. A plastic covered rope, Roblon, may be available and lasts longer than chain in many locations, but it does not have the weight of a chain that provides elasticity in a mooring. Corrosion: avoid dissimilar metals in contact; watch any moving chain as they can corrode very quickly. The moving end of the chain in the buoy mooring below lasts at most 1 year. Shackles: only use brass or stainless shackles and in most situations they are best wired with Monel wire or heavily taped to ensure they don’t work loose. Knot failure: modern ropes can be slippery. The bowline knot, once totally reliable, is no longer so. If you have any doubts about your knots, strap them - especially the tails - tightly with electricians tape. AnchorsAnchors need to be matched to the type of sea bed and are not often used in long duration moorings. On sand, digging anchors can pull out with each change of tide that causes the direction of put to reverse. Over time they can skip a long way. A better alternative is a heap of very heavy chain or a series of two or three weights. In deep mud anchors may sink and become impossible to lift. Stones may indicate strong currents, and bedrock may indicate very strong currents. Chain is often preferred as an anchor here, as traditional anchors either fail to bite or risk jamming. Take care with abrasion protection. Concrete weights: a good shape is a flat disc with a central attachment and suitable abrasion protection (above). An exampleThe sketch below shows a mooring, based on a design by Brett Stones, and used where the risk of theft was low. 36 of these were used on a shallow sandy/muddy sea bed and survived a severe storm that lifted boats out of the sea and onto the quay in the nearby harbour. The long lines between weights allow the weights to be lifted separately and add an element of elasticity. More elasticity is added by the headline floats, the leaded line between the buoys and the use of two buoys. The headline floats should be a little less than the water depth at low tide from the small weight. If larger surface buoys were required much larger weights would be needed.
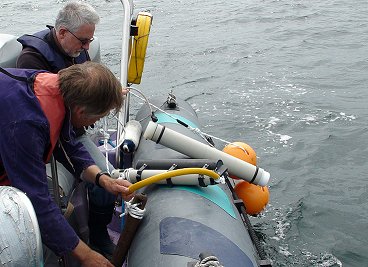
Deployment of these moorings: The picture below shows the cluttered side of the ship – the other side of deck is kept clear and clean so that the lay of the ropes and anchors can be clearly seen and isolated from snags and people. In this boat we put out a tight grid of 36 moorings and 44 PODs in 12 hours. The blue tubes are abrasion protection on the weights. The nylon '8' piece allows ropes to be attached quickly without risk of abrasion between ropes. The visible buoys are pick-up buoys – the dive buoys are smaller.
Navigational buoys
By making the POD only slightly buoyant it floats up slowly and is occasionally pulled down when the buoy drops low in a trough. The rig shown on the right needs a tidal stream or current to keep the POD away from the dropping chain as the buoy heaves. If there is no current but large waves some method is needed to keep the POD out of the line of the chain. The POD needs to be 5 metres or more below the surface. Towing PODsTowed acoustic surveys have proved powerful in measuring sperm whale densities and for other species where the detection range far exceeds the range of responsive movement. For species such as porpoises, where that is not the case, large biases are present in the data and are difficult, or impossible, to remove accurately. Surveys of finless porpoises in Hong Kong using the T-POD gave high detection rates with good correspondence to visual detections. By contrast, surveys in the Celtic and Irish Seas showed much lower rates of acoustic detection of sighted animals. The most plausible explanation appeared to be that Hong Kong is very noisy with intense shipping activity and so the porpoises are used to this environment and respond only to vessels very close to them, whereas in the much quieter Celtic and Irish Seas, avoidance behaviour was clearly seen. Porpoises here turned away from the approaching vessel and became acoustically undetectable until they re-orientated towards the towed sensor, which mostly did not happen while they were still within detection range. This kind of bias may show strong spatial variation depending on local exposure levels, habituation speeds and animal movement rates and the spatial resolution required to remove such biases may not be available from the relatively low spatial detection densities of line survey methods. There are other factors to consider: Population density estimates are made using DISTANCE line transect surveys. This method works by getting a distance from the trackine of all detected animals and fitting a curve - the detection function - to the graph of detection rates against distance from the trackline. g(0) is the term used to represent the proportion of animals on the trackline. If g(0) can be assumed or shown to be 1 (that is 100% detection on the trackline) then the detection function allows all detections within its scope to be used in estimating the density. This can work well if the detection function resembles the bell shaped curve (half of it!) of a normal distribution. If the animals respond strongly to the boat, errors can be large. If a population consisted of a combination of both 'urban' animals in ship-noisy areas that were relatively detectable, because they did not turn away from boats, and 'rural' animals that were so strongly boat averse that they were rarely detected, then serious underestimation would result as the detection function would be dominated by the urban animals. These behavioural differences might arise within hours or days of being in either type of environment and persist for a similar length of time after moving away, so they may exist even where animals are not actually residents. Differently noisy boats, changes in speed, in the use of sonars and in the length of the towing rig could all have large effects on the detection function. Dolphins can be interested in the boat or the towed gear and stay with them for long periods, re-appearing from time to time as acoustic detections. Porpoises mostly seem to move away from the boat and their directional sonar is then undetectable. Later, they re-orientate towards the boat and become detectable if the sensors are far enough astern. That distance is commonly greater than 100 metres. Despite these problems, it has to be said that if the boat, its speed, its sonar use and the towing distance are all kept the same over a series of re-surveys of the same area, then significant changes may be demonstrable and useful data may be gathered from sea states that reduce visual detections to an insignificant level. In that light, the following ideas are presented about how to tow the POD. Towing rigThe ideal characteristics for a POD tow rig are that it must be:
All the above characteristics can be achieved using a skimmer rig, if a surface tow line is acceptable. The rig consists of a diamond shaped skimmer board about 60 cm long, 35 cm wide, 4 cm thick is used. It is towed along the surface from one of the sharper corners and the two edges either side of this corner are 'sharp', while the two trailing edges are squared off. The POD housing is attached by a thin nylon line about 6 metres long to the back corner. The downward pull of the POD keeps the skimmer board stern-low so that it skims over the waves. It can be made of fibreglass, covering polyurethane foam, with attachment eyes at the front and back. The POD is housed in a 110 mm plastic ground pipe with a hemispherical insert at the front with a central hole for the tow line, which goes through and is formed into a loop that can be attached to the POD to secure it. The 110 mm pipe is long enough to reach beyond the end of the POD by about 8 cm and the sides of the tube are cut away from the stern end far enough to give the transducer a clear view sideways. A wooden bar about 2 cm square and 1 m long is clipped to the top of the stern of the tube using two screws in the bar and 'keyholes' in the tube. A groove in this bar holds an O-ring that goes around the POD transducer and pulls the POD forwards and the bar back, so that both are secured. The hemispherical nose carries a hydroplane of stainless steel. This is about 30 cm long and bent at right angles into a strong dihedral. It is attached by two screws and is given a small angle of attack by a 3 mm nut under the leading screw. In use, the POD has batteries only in the inner battery pack. The switch angle is set to allow it to be on at most angles. The POD housing and skimmer board can be thrown over the side of the boat at the same time and brought into movement with some hand control of the tow line, which is let out to 100 or 200 metres as required. A light buoyant line is adequate. If the POD hits an obstruction underwater it floats to the surface with the wooden bar standing up vertically, which makes it easy to pick up. The POD stays below the skimmer board by using the principle of a kite in reverse. Because of the low angle of attack of the hydroplane, it runs with an angle of around 20 degrees down, so that the POD does not feel the skimmer board tracking the surface too strongly. An alternative would be to dispense with both the skimmer board and the hydroplane on the tow housing and force the towing line down near the boat. If the POD was just buoyant, it would tend to follow at the same level as the tow point behind and below the boat. Vertical grappleTheft of deployed PODs is a problem in some areas. One solution we have developed is the vertical grapple rig, that allows a deployment with no surface marker that can be retrieved without diving. The mooring is a weight with the POD and a line with a few small pressure-resistant floats, such as those used on the headline of gill nets to hold it up to above around half the water depth at low tide (see diagram below).
The weight (1) also has a lifting/sweeper line (6) which is a stronger line and carries a length of light chain (4) which is attached at around half the water depth and keeps the line down. The line (6) has a grapple (2) in the line next to weight (1). Now the boat makes two circles around the mooring position - or around the marker (3). The rope handler tries to feel the chain (4) just touching the bottom, or tries to keep it above the ground if in a sensitive area - in which case a simple weight would be better than a chain. The boat then goes to a position above the mooring and the lifting line is hauled in. The grapple catches the vertical line with the floats and allows the whole rig to be lifted. Then you untangle the three lines! One big advantage of this rig is that, having only small sub-surface floats, it is not pulled by storm waves and is surprisingly quick! |
|||||||||||||||||||||||||||||||||||
 What is your experience of deploying PODs? As each deployment situation is
unique, we welcome messages about your own solutions. Please
What is your experience of deploying PODs? As each deployment situation is
unique, we welcome messages about your own solutions. Please
 Write your contact details on the outside of the POD using indelible ink.
Place a label inside the POD as well.
Write your contact details on the outside of the POD using indelible ink.
Place a label inside the POD as well.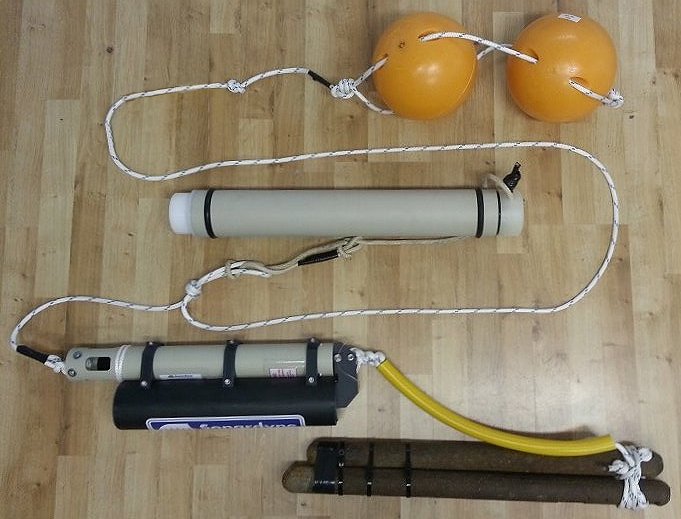

 These can be used if you can get permission but the mooring needs to
decouple the vertical heaving of the buoy from the POD. This can be done by
making the POD neutrally or slightly buoyant at the end of rope with
internal or external weighting.
These can be used if you can get permission but the mooring needs to
decouple the vertical heaving of the buoy from the POD. This can be done by
making the POD neutrally or slightly buoyant at the end of rope with
internal or external weighting.
 To retrieve the mooring a weight (1) is dropped
at the position of the mooring using GPS or good sightlines.
To retrieve the mooring a weight (1) is dropped
at the position of the mooring using GPS or good sightlines.